本文大部分内容翻译自John Langner(呼号WB2OSZ)的文章,此部分著作权归原作者所有,原文地址:http://www.g0hwc.com/sstv_modes.html
在此基础上,笔者增加了一些注释,调整了一些内容,这些内容来自于维基百科。
根据我自己的观察,在北美发送的图像中,约有 80% 是使用 Scottie 1模式。还会听到一些 Scottie 2,Martin M1,Robot 36和Robot 72模式的信号。其他的则极为罕见。
在欧洲,有人告诉我,那里大约有 95% 的人使用 Martin M1模式
在日本,Robot和AVT模式显然很受欢迎。在 1994 年的 Dayton Hamvention大会(译注:一个大型的业余无线电集会)上,Tasco公司展示了他们新型的TSC-100 SSTV转换器(也就是将图像和SSTV信号进行互转的东西)。每个人都对这个产品印象深刻,但没人去买。为啥?因为它只支持四种模式:Robot 36 和 Robot 72,AVT 90 和AVT 94。Tasco 显然没有对世界其他地方的使用情况进行任何市场调查。

(译者找的图,这就是TSC-100转换器)
下面是SSTV各种模式的一些参数,以及他们之间的区别
以下是当前使用的 SSTV 模式的一些特征。您会注意到,表格里没有列出每行的像素数。这是因为 SSTV 可以使用任何采样率的模拟调制方式。根据具体方式不同,同一条扫描线上可能会有 256,320,512,640 或其他数量的像素点。它们都是兼容的,但每条扫描线具有更多像素的那些方式,能拥有更好的细节。
| 模式组 | 模式名称 | 颜色类型 | 单帧发送时间(秒) | 垂直扫描线数量 | 备注号(见表格末尾) |
|---|---|---|---|---|---|
| 24 | RGB | 24 | 120 | d | |
| 90 | RGB | 90 | 240 | d | |
| AVT | 94 | RGB | 94 | 200 | d |
| 188 | RGB | 188 | 400 | d | |
| 125 | 黑白 | 125 | 400 | d | |
| —————— | —————— | —————— | —————— | —————— | —————— |
| 1 | RGB | 114 | 240 | b | |
| 2 | RGB | 58 | 240 | b | |
| Martin | 3 | RGB | 57 | 120 | c |
| 4 | RGB | 29 | 120 | c | |
| HQ1 | YC | 90 | 240 | ||
| HQ2 | YC | 112 | 240 | ||
| —————— | —————— | —————— | —————— | —————— | —————— |
| P3 | RGB | 203 | 16+480 | ||
| Pasokon TV | P5 | RGB | 305 | 16+480 | |
| P7 | RGB | 406 | 16+480 | ||
| —————— | —————— | —————— | —————— | —————— | —————— |
| 240 | YC | 248 | 480 | ||
| 180 | YC | 187 | 480 | ||
| PD | 160 | YC | 161 | 384 | |
| 120 | YC | 126 | 480 | ||
| 90 | YC | 90 | 240 | ||
| —————— | —————— | —————— | —————— | —————— | —————— |
| 8 | 黑白 | 8 | 120 | a,e | |
| 12 | 黑白 | 12 | 120 | e | |
| 24 | 黑白 | 24 | 240 | e | |
| 36 | 黑白 | 36 | 240 | e | |
| Robot | 12 | YC | 12 | 120 | |
| 24 | YC | 24 | 120 | ||
| 36 | YC | 36 | 240 | ||
| 72 | YC | 72 | 240 | ||
| —————— | —————— | —————— | —————— | —————— | —————— |
| 1 | RGB | 110 | 240 | b | |
| 2 | RGB | 71 | 240 | b | |
| Scottie | 3 | RGB | 55 | 120 | c |
| 4 | RGB | 36 | 120 | c | |
| DX | RGB | 269 | 240 | b | |
| —————— | —————— | —————— | —————— | —————— | —————— |
| 24 | RGB | 24 | 120 | c | |
| Wraase SC-1 | 48 | RGB | 48 | 240 | b |
| 96 | RGB | 96 | 240 | b | |
| —————— | —————— | —————— | —————— | —————— | —————— |
| 30 | RGB | 30 | 128 | ||
| Wraase SC-2 | 60 | RGB | 60 | 256 | |
| 120 | RGB | 120 | 256 | ||
| 180 | RGB | 180 | 256 |
也有一些正在试验中的模式,只在一两个系统中实现了。有些模式仍在发展中,有些将逐步淘汰,这里的信息可能不准确。至于其他人是否决定增删它们,还有待观察:
| 模式组 | 模式名称 | 颜色类型 | 单帧发送时间(秒) | 垂直扫描线数量 | 备注号(见表格末尾) |
|---|---|---|---|---|---|
| ProSkan | J120 | RGB | 120 | 240 | |
| —————— | —————— | —————— | —————— | —————— | |
| GVA 125 | 黑白 | 125 | 480 | ||
| WinPixPro | GVA 125 | RGB | 125 | 240 | |
| GVA 250 | RGB | 250 | 480 | ||
| —————— | —————— | —————— | —————— | —————— | |
| “J.A.” | 未知 | 未知 | 未知 | 480 | |
| —————— | —————— | —————— | —————— | —————— | |
| MSCAN | TV1 | 未知 | 未知 | 未知 | |
| TV2 | 未知 | 未知 | 未知 |
颜色类型:
- RGB:红色、绿色和蓝色部分单独发送
- YC:亮度 (Y) 和色度(R-Y 和 B-Y)单独发送
备注号的意义:
- a:类似于原始的8秒黑白标准(译注:也就是MMSSTV中的B/W 8模式)
- b:开头16行是灰度。240 条可用扫描线。
- c:开头8行是灰度。 120 条可用扫描线。
- d:AVT 模式没有水平同步信号,取而代之的是开头有一个 5 秒的数字脉冲序列,来实现预对齐帧定时。(译注:数字脉冲序列使用切换不同的方式来实现预对齐。AVT模式还使用了隔行扫描与隔行重建技术,提高抗干扰能力。但缺点在于,一旦你没收到开头信号,那就得让软件自己猜要怎么同步了)
- e:Robot 1200C(译注:一种SSTV转换器,后面还会提到)没有真正的黑白模式,但它可以分别发送红色、绿色或蓝色分量内存中的内容。 传统上,以仅发送绿色分量的方式,粗略近似为黑白图像
VIS 码,及其发送方式
大约 30 年前,最初的 8 秒黑白 SSTV 模式(B/W 8模式)使用 5 毫秒的 1200 Hz 信号进行水平同步(分隔扫描线)和 30 毫秒的 1200 Hz 进行垂直同步。 Robot 1200C 转换器入了称为垂直间隔信号 (VIS) 的新概念。 现在所有新近的 SSTV 系统都使用更长的垂直同步信号,并带有了代表下表所示的数字代码。 这允许接收站自动选择正确的接收模式:
垂直间隔信令代码表
由约翰·兰纳(呼号 WB2OSZ)编译
1997 年 4 月版
(译注:VIS码最高位用于偶校验,实际可用为七位。
受限于Markdown,该表格阅读方法为:低四位+第567位+P(偶校验),例如:Martin M1模式,即为0000010P)
| 第5,6,7位 | 第5,6,7位 | 第5,6,7位 | 第5,6,7位 | 第5,6,7位 | ||||
|---|---|---|---|---|---|---|---|---|
| 低四位 | 000 | 001 | 010 | 011 | 100 | 101 | 110 | 111 |
| 0000 | Robot 12sec color | SC-1 24 color | Martin M1 | Scottie S4 | AVT 24 [3] | AVT125 [4a] | Acorn PD180 | Pasokon TV [6] |
| 0001 | Robot 8sec red [1] | [7] | [8] | AVT 24 narrow | AVT125 [4a] narrow | Acorn PD180 | Pasokon TV P3 | |
| 0010 | Robot 8sec green [1] | [7] | [8] | AVT 24 QRM | AVT125 [4a] QRM | Acorn PD160 | Pasokon TV P5 GVA 125 | |
| 0011 | Robot 8sec blue [1] | [7] | SC-2 30 Sec color | AVT 24 Nar + QRM | AVT125 [4a] Nar + QRM | Acorn PD90 | Pasokon TV P7 PD 65 | |
| 0100 | Robot 24 sec Color [1] | SC-1 48 [2] Color | Martin M3 | Scottie S3 | AVT 90 | [5] | Proscan J120 | [5] |
| 0101 | Robot 12 sec red [1] | [7] | [8] | AVT 90 narrow | ||||
| 0110 | Robot 12 sec green [1] | AVT 90 QRM | ||||||
| 0111 | Robot 12 sec blue [1] | [7] | SC-2 180sec color | AVT 90 Nar + QRM | GVA BW 125 | |||
| 1000 | Robot 36 color | SC-1 28 [2] Color | Martin M2 | Scottie S2 | AVT 94 | MSCAN future | ||
| 1001 | Robot 24 red [1] XA robot | [7] | [8] | AVT | MSCAN future | |||
| 1010 | Robot 24 green [1] | [7] | [8] | AVT 94 QRM | MSCAN future | |||
| 1011 | Robot 24 blue [1] | [7] | SC-2 60 sec color | AVT 94 Nar + QRM | MSCAN future | |||
| 1100 | Robot 72 color | SC-1 96 color | Martin M1 | Scottie S1 | AVT 188 Scottie DX [4b] | GVA 250 | ||
| 0001 | Robot 8sec red [1] | [7] | [8] | AVT 188 narrow | ||||
| 0010 | Robot 8sec green [1] | [7] | [8] | AVT 188 QRM | ||||
| 0011 | Robot 8sec blue [1] | [7] | SC-2 120 Sec color | AVT 188 Nar + QRM | AVT125 [4a] Nar + QRM | PD120 |
注释的含义:
- [1]:Robot 1200C 转换器可以发送复合颜色或仅发送红色、绿色或蓝色分量之一。 一些 SC-1、Martin 和 Scottie 的实现,也只允许传输一种颜色分量。 这意味着完全使用了第 0 列到第 4 列
- [2]:有两种不同的 Wraase SC-1 48 秒模式。一个的发送时间是另一个的两倍,但行数是另一个的一半
- [3]:Nar代表使用比通常的 1500 - 2300 Hz 更窄的频偏,因此可以在接收器上使用更窄的带宽。QRM 代表是隔行扫描的模式
- [4a] :一些消息来源表明,Scottie DX 具有与 AVT 125 相同的 VIS 代码。Robot 1200C 使用代码 0xCC,与 AVT 188 相同
[4b]:由于开发人员之间缺乏沟通,Scottie DX 和 AVT 188 具有相同的 VIS 代码。咱不要再犯这种错误了! - [5]:这些字段,还没有标准化的用途:
第 5 列 - 最后 12 行。(译注:算的均是数据区,表头行头不算)
第 6 列 - 整列。
第 7 列 - 最后 12 行。 - [6] 第 7 列的前 4 行用于新模式,例如 640 x 480分辨率。第一行保留供将来使用,其他三行用于 P3、P5 和 P7模式。
- [7] 此列中未使用的位置由 Martin Emmerson G3OQD 为未来的 Martin 模式保留。我(原作者)假设 HQ1 和 HQ2 在这个范围内,但具体怎样,我就不清楚了。
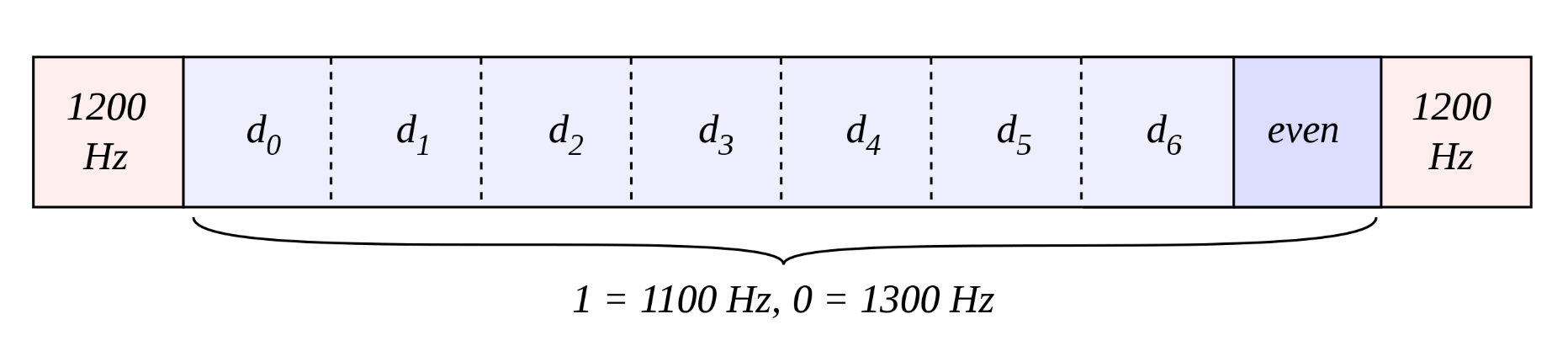
VIS代码的发送方式是:
- SSTV开始发送时,先是300ms的1900 Hz 引导音,接着一个10ms的1200 Hz信号,接着又是300ms的1900 Hz 引导音。引导音完了,代表VIS码开始
- VIS码首先是30ms的1200Hz信号
- 然后是7个数据位,从低到高发送。每个数据位时长30毫秒,用1100Hz代表1,1300Hz代表0
- 接着是偶校验位,30毫秒,同样是用1100Hz代表1,1300Hz代表0
- 最后是30ms的1200Hz信号,代表VIS码结束,开始传输图片数据
图示:
(全文完)
